वायुमण्डलीय पत्ता लगाउने विधिहरू
वायुमण्डलीय पत्ता लगाउने मुख्य विधिहरू हुन्: माइक्रोवेभ राडार ध्वनि विधि, हावामा उड्ने वा रकेट ध्वनि विधि, ध्वनि बेलुन, उपग्रह रिमोट सेन्सिङ, र LIDAR। माइक्रोवेभ राडारले साना कणहरू पत्ता लगाउन सक्दैन किनभने वायुमण्डलमा पठाइएका माइक्रोवेभहरू मिलिमिटर वा सेन्टिमिटर तरंगहरू हुन्, जसको तरंगदैर्ध्य लामो हुन्छ र साना कणहरू, विशेष गरी विभिन्न अणुहरूसँग अन्तर्क्रिया गर्न सक्दैन।
हावामा उड्ने र रकेट ध्वनि निकाल्ने विधिहरू महँगो हुन्छन् र लामो समयसम्म अवलोकन गर्न सकिँदैन। बेलुनहरूको ध्वनि निकाल्ने लागत कम भए पनि, तिनीहरू हावाको गतिबाट बढी प्रभावित हुन्छन्। स्याटेलाइट रिमोट सेन्सिङले अन-बोर्ड राडार प्रयोग गरेर ठूलो मात्रामा विश्वव्यापी वायुमण्डल पत्ता लगाउन सक्छ, तर स्थानिय रिजोल्युसन अपेक्षाकृत कम छ। वायुमण्डलमा लेजर बीम उत्सर्जन गरेर र वायुमण्डलीय अणुहरू वा एरोसोलहरू र लेजर बीचको अन्तरक्रिया (छिटपुट र अवशोषण) प्रयोग गरेर वायुमण्डलीय प्यारामिटरहरू प्राप्त गर्न लिडर प्रयोग गरिन्छ।
लेजरको बलियो दिशात्मकता, छोटो तरंगदैर्ध्य (माइक्रोन तरंग) र साँघुरो पल्स चौडाइ, र फोटोडिटेक्टर (फोटोमल्टीप्लायर ट्यूब, एकल फोटोन डिटेक्टर) को उच्च संवेदनशीलताको कारण, लिडारले वायुमण्डलीय प्यारामिटरहरूको उच्च परिशुद्धता र उच्च स्थानिय र अस्थायी रिजोल्युसन पत्ता लगाउन सक्छ। यसको उच्च शुद्धता, उच्च स्थानिय र अस्थायी रिजोल्युसन र निरन्तर अनुगमनको कारण, LIDAR वायुमण्डलीय एयरोसोल, बादल, वायु प्रदूषक, वायुमण्डलीय तापक्रम र हावाको गति पत्ता लगाउन द्रुत गतिमा विकास गरिरहेको छ।
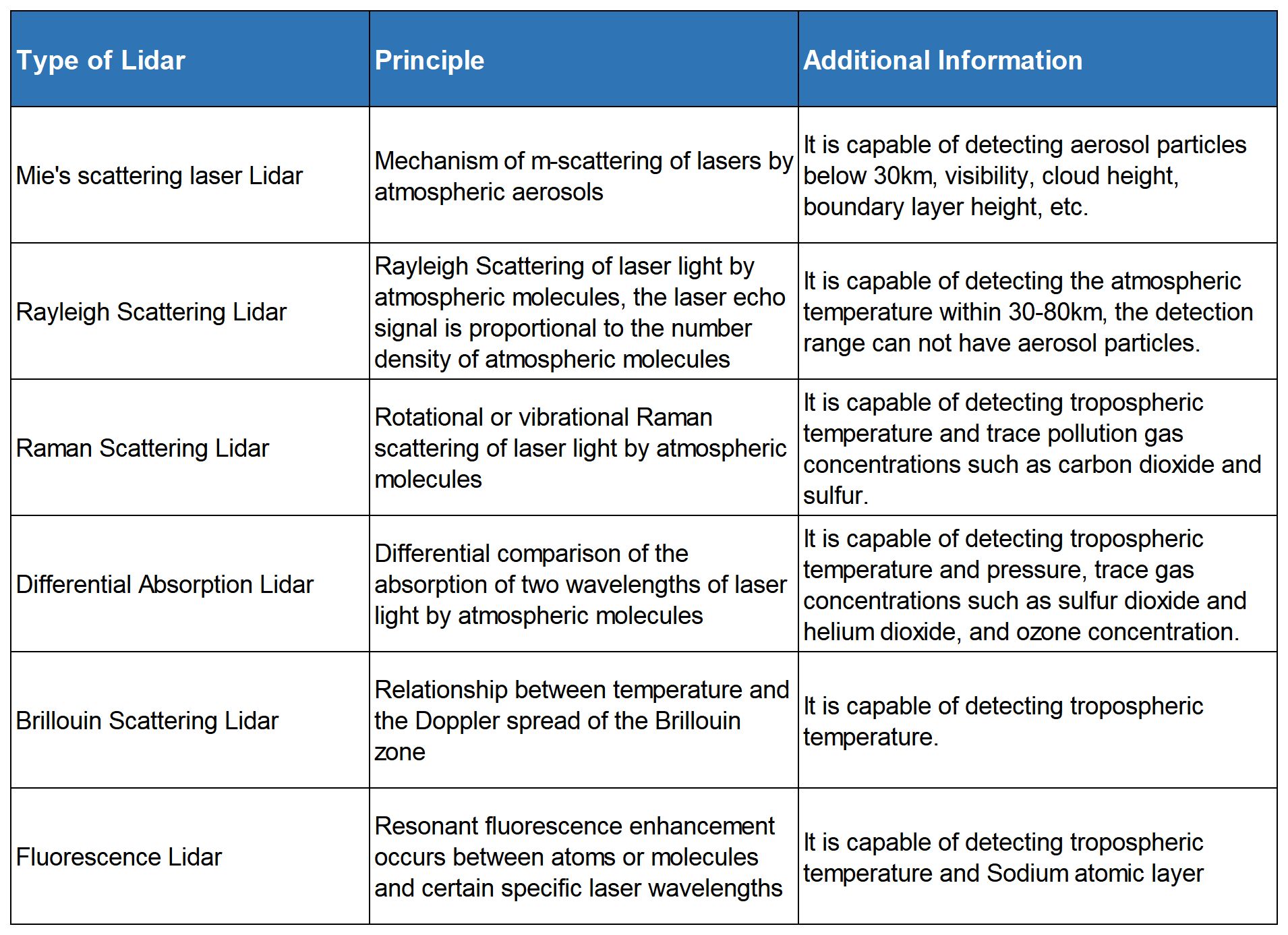
लिडरका प्रकारहरू निम्न तालिकामा देखाइएको छ:
वायुमण्डलीय पत्ता लगाउने विधिहरू
वायुमण्डलीय पत्ता लगाउने मुख्य विधिहरू हुन्: माइक्रोवेभ राडार ध्वनि विधि, हावामा उड्ने वा रकेट ध्वनि विधि, ध्वनि बेलुन, उपग्रह रिमोट सेन्सिङ, र LIDAR। माइक्रोवेभ राडारले साना कणहरू पत्ता लगाउन सक्दैन किनभने वायुमण्डलमा पठाइएका माइक्रोवेभहरू मिलिमिटर वा सेन्टिमिटर तरंगहरू हुन्, जसको तरंगदैर्ध्य लामो हुन्छ र साना कणहरू, विशेष गरी विभिन्न अणुहरूसँग अन्तर्क्रिया गर्न सक्दैन।
हावामा उड्ने र रकेट ध्वनि निकाल्ने विधिहरू महँगो हुन्छन् र लामो समयसम्म अवलोकन गर्न सकिँदैन। बेलुनहरूको ध्वनि निकाल्ने लागत कम भए पनि, तिनीहरू हावाको गतिबाट बढी प्रभावित हुन्छन्। स्याटेलाइट रिमोट सेन्सिङले अन-बोर्ड राडार प्रयोग गरेर ठूलो मात्रामा विश्वव्यापी वायुमण्डल पत्ता लगाउन सक्छ, तर स्थानिय रिजोल्युसन अपेक्षाकृत कम छ। वायुमण्डलमा लेजर बीम उत्सर्जन गरेर र वायुमण्डलीय अणुहरू वा एरोसोलहरू र लेजर बीचको अन्तरक्रिया (छिटपुट र अवशोषण) प्रयोग गरेर वायुमण्डलीय प्यारामिटरहरू प्राप्त गर्न लिडर प्रयोग गरिन्छ।
लेजरको बलियो दिशात्मकता, छोटो तरंगदैर्ध्य (माइक्रोन तरंग) र साँघुरो पल्स चौडाइ, र फोटोडिटेक्टर (फोटोमल्टीप्लायर ट्यूब, एकल फोटोन डिटेक्टर) को उच्च संवेदनशीलताको कारण, लिडारले वायुमण्डलीय प्यारामिटरहरूको उच्च परिशुद्धता र उच्च स्थानिय र अस्थायी रिजोल्युसन पत्ता लगाउन सक्छ। यसको उच्च शुद्धता, उच्च स्थानिय र अस्थायी रिजोल्युसन र निरन्तर अनुगमनको कारण, LIDAR वायुमण्डलीय एयरोसोल, बादल, वायु प्रदूषक, वायुमण्डलीय तापक्रम र हावाको गति पत्ता लगाउन द्रुत गतिमा विकास गरिरहेको छ।
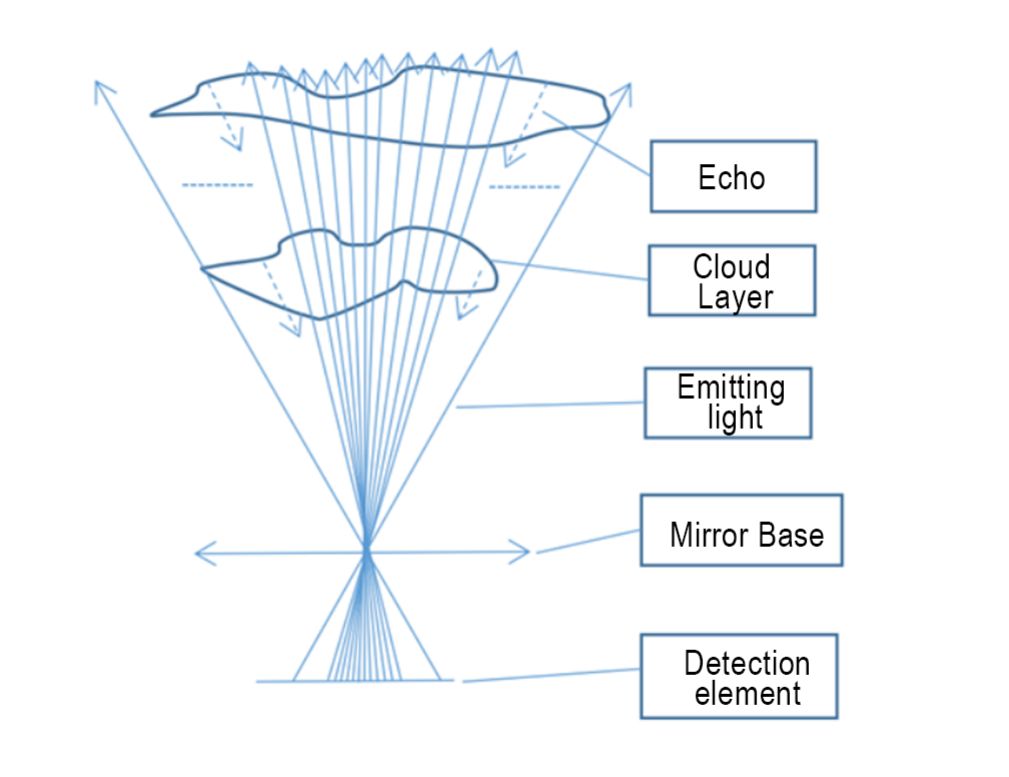
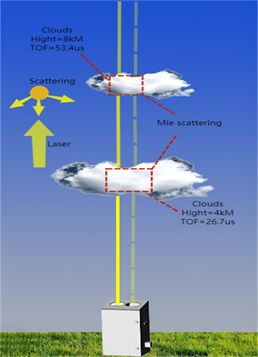
क्लाउड मापन राडारको सिद्धान्तको योजनाबद्ध रेखाचित्र
बादल तह: हावामा तैरिरहेको बादल तह; उत्सर्जित प्रकाश: विशिष्ट तरंगदैर्ध्यको कोलिमेटेड बीम; प्रतिध्वनि: बादल तहबाट उत्सर्जन भएपछि उत्पन्न हुने पछाडि छरिएको संकेत; ऐना आधार: टेलिस्कोप प्रणालीको समतुल्य सतह; पत्ता लगाउने तत्व: कमजोर प्रतिध्वनि संकेत प्राप्त गर्न प्रयोग गरिने फोटोइलेक्ट्रिक उपकरण।
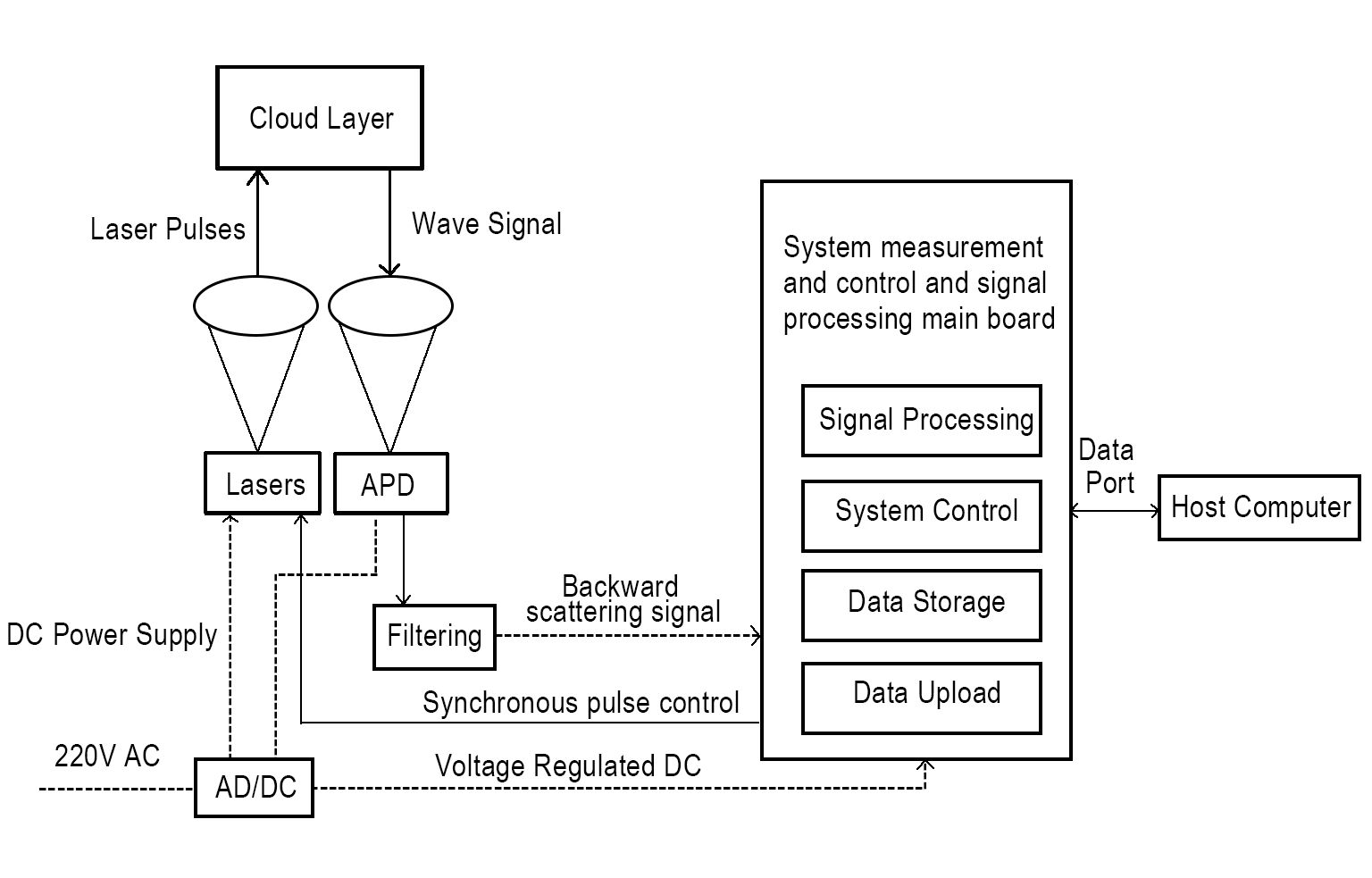
क्लाउड मापन राडार प्रणालीको कार्य ढाँचा
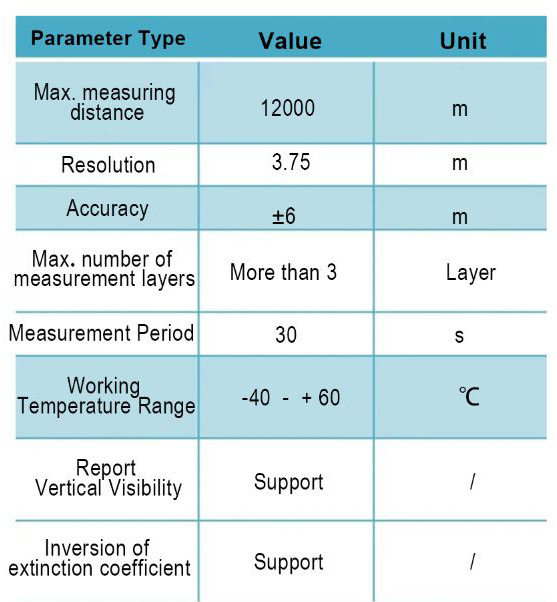
क्लाउड मापनको मुख्य प्राविधिक प्यारामिटरहरू लुमिस्पट टेक लिडार
उत्पादनको छवि

आवेदन

उत्पादनहरू कार्य स्थिति रेखाचित्र
पोस्ट समय: मे-०९-२०२३